Tracking and Identification of Ice Hockey Players
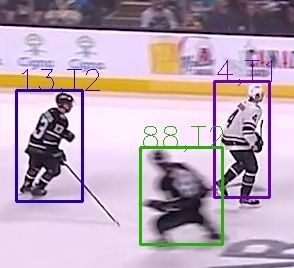
Our paper Tracking and Identification of Ice Hockey Players has been published as a conference paper at the International Conference on Computer Vision Systems (ICVS), 2023. The work is co-authored by Qiao Chen and Charalambos Poullis.