The paper "From data to action in flood forecasting leveraging graph neural networks and digital twin visualization" by Naghmeh Shafiee Roudbari, Shubham Rajeev Punekar, Zachary Patterson, Ursula Eicker, and Charalambos Poullis has been accepted for publication in Scientific Reports.
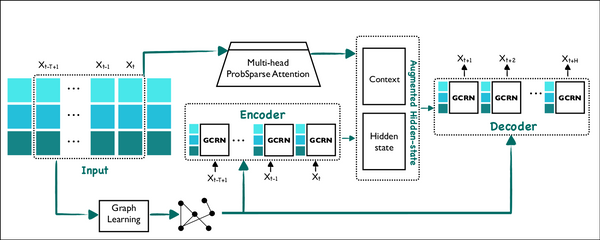
TL;DR: Firstly, we present the graph neural network