Our work on "Adaptive Memory Management for Video Object Segmentation" has been
accepted as a conference paper at 19th Conference on Robots and Vision (CRV),
2022. The paper is co-authored by Ali Pourganjalikhan, Charalambos Poullis.
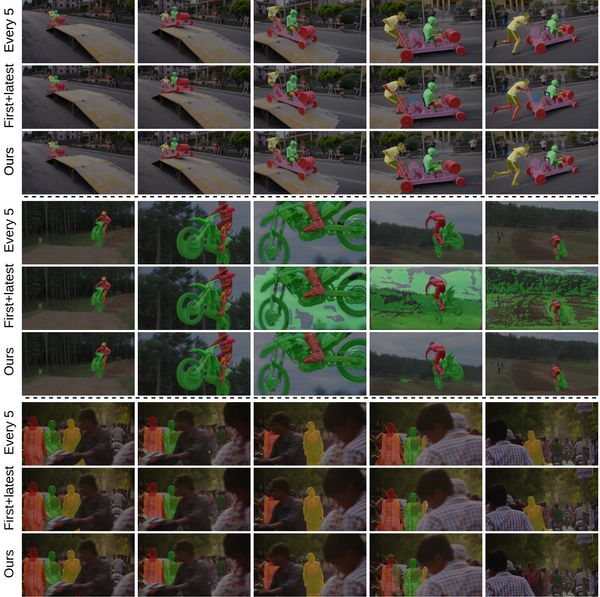
Abstract: Matching-based networks have achieved state-of-the-art performance for
video object segmentation (VOS) tasks