Join us at the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications

Join us at the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, GRAPP 2017.
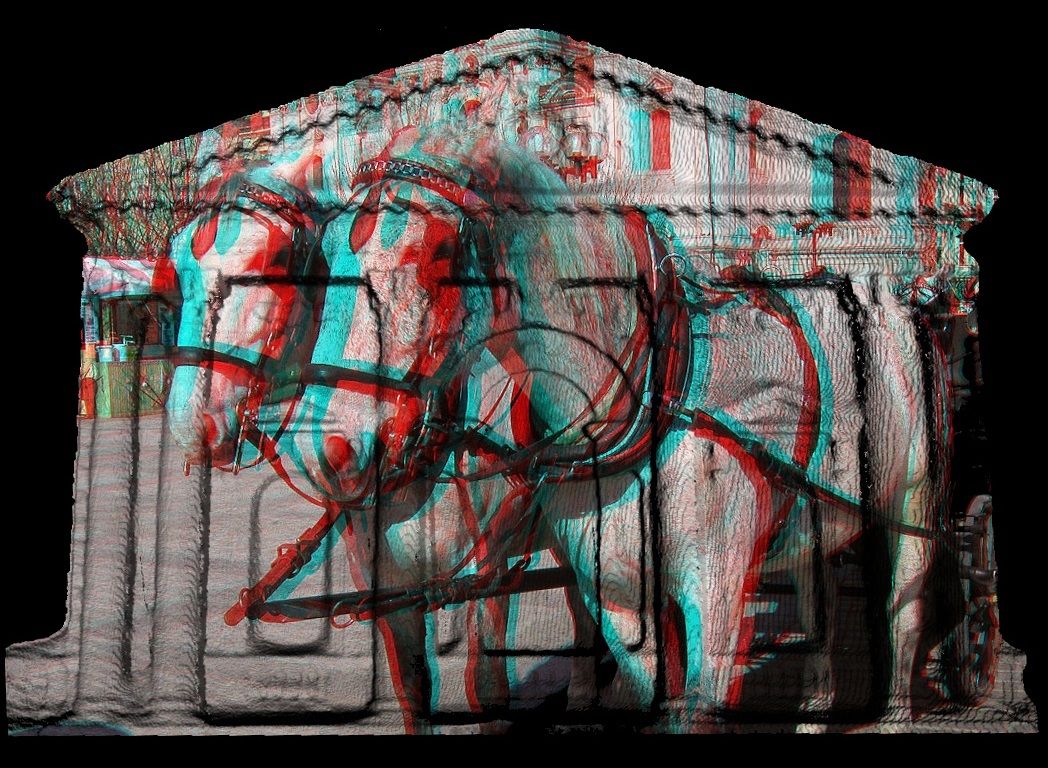
ICT Lab researcher Behnam Maneshgar will be presenting our paper “A Long-Range Vision System for Projection Mapping of Stereoscopic Content in Outdoor Areas“. The work is co-authored with Leila Sujir, Sudhir P. Mudur, Charalambos Poullis.
Abstract: Spatial Augmented Reality, or its more commonly known name Projection Mapping (PM), is a projection technique which transforms a real-life object or scene into a surface for video projection (Raskar et al., 1998b). Although this technique has been pioneered and used by Disney since the seventies, it is in recent years that it has gained significant popularity due to the availability of specialized software which simplifies the otherwise cumbersome calibration process (Raskar et al., 1998a). Currently, PM is being widely used in advertising, marketing, cultural events, live performances, theater, etc as a way of enhancing an object/scene by superimposing visual content (Ridel et al., 2014). However, despite the wide availability of specialized software, several restrictions are still imposed on the type of objects/scenes on which PM can be applied. Most limitations are due to problems in handling objects/scenes with (a) complex reflectance properties and (b) low intensity or distinct colors. In this work, we address these limitations and present solutions for mitigating these problems. We present a complete framework for calibration, geometry acquisition and reconstruction, estimation of reflectance properties, and finally color compensation; all within the context of outdoor long-range PM of stereoscopic content. Using the proposed technique, the observed projections are as close as possible [constrained by hardware limitations] to the actual content being projected; therefore ensuring the perception of depth and immersion when viewed with stereo glasses. We have performed extensive experiments and the results are reported.